Al hablar de robótica educativa, no deberíamos perder de vista que para proponer actividades con sentido pedagógico, contextualizar los problemas para resolver es una cuestión relevante porque se relaciona directamente con la motivación que genera la propuesta de enseñanza y, de allí, la posibilidad de que, efectivamente, se produzcan aprendizajes significativos. Así que, tras la fascinación inicial por este nuevo recurso cuya exploración inicial abordé en mis post anteriores, haré hoy un alto en mi recorrido para pensar en una primer proyecto pedagógico al que he puesto como nombre: “Bailando por un programa”.
Este proyecto, de caracter integrador, podría estar destinado a niños del tercer ciclo del nivel primario y requeriría ciertos conocimientos previos. Podría implementarse de forma grupal distribuyendo deliberadamente equipos de trabajo que pudieran complementar habilidades, teniendo el propósito de incluir a estudiantes con habilidades diferentes.
Objetivo del proyecto
El objetivo principal del proyecto es que los estudiantes resuelvan grupalmente un desafío concreto de programación. El desafío será, en esta propuesta, programar al robot para que pueda ejecutar música y bailar. La idea es enmarcar este desafío en el contexto de un concurso de baile, emulando un reality televisivo en su dimensión artística, por supuesto.
El desafío técnico
Este proyecto está pensado para ser implementado con mBot ya que es el producto que he explorado pero muy probablemente pueda adaptarse a otro recurso similar. Instrumentalmente, los conocimientos previos con los que los estudiantes deben contar para poder resolver el problema planteado desde la consigna son:
- Conocimientos básicos del entorno Scratch (para Make a Block)
- Conocimientos básicos de música (para poder traducir una partitura en el sistema de notación americano o para componer o crear una melodía)
- Comandos para controlar el buzzer del robot
- Comados para crear bloques con subrutinas
- Comandos de movimiento
Observación: Una de las dificultades más complejas de resolver, probablemente, será el hecho de que para lograr que el robot cambie la secuencia de movimientos coreográficos, será necesario “partir” las frases musicales de modo tal que las pausas “invisibles” que se incluyen dentro de las galerías no generen “bugs”. Es importante en este punto estar cerca del proceso para acompañar con sugerencias de solución en caso que el nivel de difcultad comience a ser excesivamente frustrante.
La secuencia de actividades sugerida
1. Se explica el objetivo general de la propuesta y se introduce la dinámica de trabajo.
2. Reunidos en grupos de tres o cuatro, se entrega una partitura junto con la consigna que explica el desafío. Otra posibilidad es solicitar que el grupo mismo componga la melodía o programe “de oído” una melodía conocida. La consigna debería incluir también aspectos accesorios como inventar un nombre para el robot y un otro para el show de baile, por ejemplo.
3. Se propone una discusión colectiva entre todos los equipos para explicar en detalle la consinga y para discutir respecto a cuál sería la estrategia de programación más conveniente:
- ¿Qué tareas deberán realizar?
- ¿Cómo dividirán el trabajo?
- ¿Por donde comenzarán?
- ¿Qué comandos necesitarán?
A partir del intercambio de ideas se evalua el nivel de andamiaje que los grupos requerirán para resolver la consigna.
4. Una vez que los grupos terminaron el trabajo se realiza una presentación grupal que consta de tres momentos:
a) Exhibición
b) Explicación del código del programa
c) Relato del proceso de trabajo
5. Finalmente, cada participante tendrá una ficha en la cual podrá emitir su voto secreto y subjetivo para el concurso de baile. El voto secreto supondrá una calificación del 1 al 10 en tres categorías, por ejemplo:
Robot: Nombre del robot
|
Calificación del 1 al 10
|
Música
| |
Coreografía
| |
Nombre del show musical
|
Sería adecuado que los participantes califiquen siempre los robots ajenos pero no el del equipo propio. Luego, se contabilizarán las calificaciones totales y así se elegirá a los ganadores en cada categoría. Según la cantidad de participantes podrá ajustarse el sistema de votación para que todos los robots tengan oportunidad de destacarse en algún aspecto.
Apuntes técnicos y una resolución de las muchas posibles
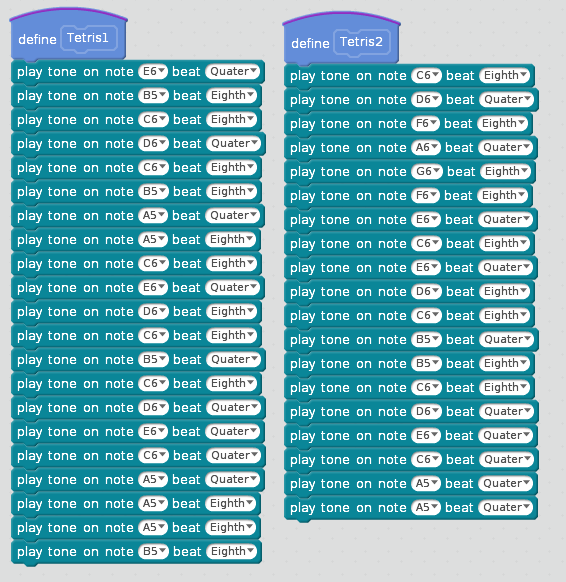
Como ejemplo de resolución, utilizamos la melodía del popular juego “Tetris” que obtuvimos, en este caso, de una partitura.

Un modo práctico de resolver es programar la melodía en bloques que permiten establecer diferentes momentosdos momentos en el movimiento coreográfico del robot. Cada secuencia se corresponderá con un bloque que conformará una subrutina que permite ejecutar la melodía.
Por último, se intercalan en el programa los bloques con el encendido alternado de los motores de modo que el robot gira en una sola dirección simulando un paso de baile. Este movimiento cambia de dirección al comenzar la segunda parte de la canción. El procedimiento se repite dos veces y se activa con el control remoto:

Finalmente, el resultado en acción es el siguiente:
¿Cuál sería tu voto para el show de mi robot?
Este es el quinto post sobre nuestras experiencias con mBot. Si te intersa conocer como llegamos aquí podés vistar nuestros post anteriores: “Primeras experiencias en robótica educativa”, “Con ojos de robot” , “¡Alto ahi”: Programando con el control remoto” y “Música robótica” en este mismo blog.
|
No hay comentarios.:
Publicar un comentario