Siempre que hablamos de las ventajas del aprendizaje colaborativo señalamos que la posibilidad de aprender junto a otros es potenciadora para todos los que se involucran en la experiencia. En este sentido, las posiblidades que se abren a través de las herramientas digitales sincrónicas y asincrónicas que pueden hoy utilizarse en propuestas de enseñanza de e-learning abre el juego a muy valiosas oportunidades. Pero ¿realmente el trabajo colaborativo en propuestas de e-learning favorece mejores aprendizajes?
Con el objetivo de responder dicha pregunta, este trabajo analiza la relación entre los climas grupales que se generan en el contexto de un cursos en línea en el nivel de posgrado (cursos de e-learning que proponen actividades de tipo colaborativas) y el rendimiento académico de los estudiantes. Para estudiar el clima grupal, se identificaron tres dimensiones emergentes: el tipo de motivación, el perfil social que predomina en el grupo y las características del liderazgo. A través de la combinación de estas tres dimensiones, se tipificaron cuatro patrones de comportamiento grupal: a) proactivo, b) expeditivo, c) conflictivo y d) disfuncional, con los que fueron clasificados algunos de los pequeños grupos observados en los casos bajo estudio.
 |
| Climas grupales y rendimiento académico
Esta tipificación fue contrastada con las retroalimentaciones que los docentes entregaron a cada equipo tras la tarea realizada, pudiéndose observar que los equipos proactivos obtuvieron una calificación destacada. Los equipos que describieron otros patrones de clima grupal tuvieron, al final del proceso, un rendimiento heterogéneo. Esta relación coincide, además, con la percepción de los docentes a cerca de que los climas proactivos favorecen buenos resultados académicos.
|
jueves, octubre 27, 2016
Aprendizaje colaborativo en e-learning: climas grupales y rendimiento académico
martes, septiembre 20, 2016
Animarse a innovar
En mayo pasado, tuvimos el honor de ser premiados por la Universidad de Palermo por un trabajo de diseño pedagógico que exploraba los caminos de la innovación. Fue un momento muy enriquecedor encontrarnos con colegas que trabajan en el mismo sentido.
Comparto mi resumen sobre la experiencia.
viernes, julio 08, 2016
Je suis Da Vinci: Impresión 3D
¿Qué es una impresora 3D?


viernes, abril 15, 2016
Bailando por un programa: proyecto para robótica educativa
Al hablar de robótica educativa, no deberíamos perder de vista que para proponer actividades con sentido pedagógico, contextualizar los problemas para resolver es una cuestión relevante porque se relaciona directamente con la motivación que genera la propuesta de enseñanza y, de allí, la posibilidad de que, efectivamente, se produzcan aprendizajes significativos. Así que, tras la fascinación inicial por este nuevo recurso cuya exploración inicial abordé en mis post anteriores, haré hoy un alto en mi recorrido para pensar en una primer proyecto pedagógico al que he puesto como nombre: “Bailando por un programa”.
Este proyecto, de caracter integrador, podría estar destinado a niños del tercer ciclo del nivel primario y requeriría ciertos conocimientos previos. Podría implementarse de forma grupal distribuyendo deliberadamente equipos de trabajo que pudieran complementar habilidades, teniendo el propósito de incluir a estudiantes con habilidades diferentes.
Objetivo del proyecto
El objetivo principal del proyecto es que los estudiantes resuelvan grupalmente un desafío concreto de programación. El desafío será, en esta propuesta, programar al robot para que pueda ejecutar música y bailar. La idea es enmarcar este desafío en el contexto de un concurso de baile, emulando un reality televisivo en su dimensión artística, por supuesto.
El desafío técnico
Este proyecto está pensado para ser implementado con mBot ya que es el producto que he explorado pero muy probablemente pueda adaptarse a otro recurso similar. Instrumentalmente, los conocimientos previos con los que los estudiantes deben contar para poder resolver el problema planteado desde la consigna son:
- Conocimientos básicos del entorno Scratch (para Make a Block)
- Conocimientos básicos de música (para poder traducir una partitura en el sistema de notación americano o para componer o crear una melodía)
- Comandos para controlar el buzzer del robot
- Comados para crear bloques con subrutinas
- Comandos de movimiento
Observación: Una de las dificultades más complejas de resolver, probablemente, será el hecho de que para lograr que el robot cambie la secuencia de movimientos coreográficos, será necesario “partir” las frases musicales de modo tal que las pausas “invisibles” que se incluyen dentro de las galerías no generen “bugs”. Es importante en este punto estar cerca del proceso para acompañar con sugerencias de solución en caso que el nivel de difcultad comience a ser excesivamente frustrante.
La secuencia de actividades sugerida
1. Se explica el objetivo general de la propuesta y se introduce la dinámica de trabajo.
2. Reunidos en grupos de tres o cuatro, se entrega una partitura junto con la consigna que explica el desafío. Otra posibilidad es solicitar que el grupo mismo componga la melodía o programe “de oído” una melodía conocida. La consigna debería incluir también aspectos accesorios como inventar un nombre para el robot y un otro para el show de baile, por ejemplo.
3. Se propone una discusión colectiva entre todos los equipos para explicar en detalle la consinga y para discutir respecto a cuál sería la estrategia de programación más conveniente:
- ¿Qué tareas deberán realizar?
- ¿Cómo dividirán el trabajo?
- ¿Por donde comenzarán?
- ¿Qué comandos necesitarán?
A partir del intercambio de ideas se evalua el nivel de andamiaje que los grupos requerirán para resolver la consigna.
4. Una vez que los grupos terminaron el trabajo se realiza una presentación grupal que consta de tres momentos:
a) Exhibición
b) Explicación del código del programa
c) Relato del proceso de trabajo
5. Finalmente, cada participante tendrá una ficha en la cual podrá emitir su voto secreto y subjetivo para el concurso de baile. El voto secreto supondrá una calificación del 1 al 10 en tres categorías, por ejemplo:
Robot: Nombre del robot
|
Calificación del 1 al 10
|
Música
| |
Coreografía
| |
Nombre del show musical
|
Sería adecuado que los participantes califiquen siempre los robots ajenos pero no el del equipo propio. Luego, se contabilizarán las calificaciones totales y así se elegirá a los ganadores en cada categoría. Según la cantidad de participantes podrá ajustarse el sistema de votación para que todos los robots tengan oportunidad de destacarse en algún aspecto.
Apuntes técnicos y una resolución de las muchas posibles
Como ejemplo de resolución, utilizamos la melodía del popular juego “Tetris” que obtuvimos, en este caso, de una partitura.

Un modo práctico de resolver es programar la melodía en bloques que permiten establecer diferentes momentosdos momentos en el movimiento coreográfico del robot. Cada secuencia se corresponderá con un bloque que conformará una subrutina que permite ejecutar la melodía.
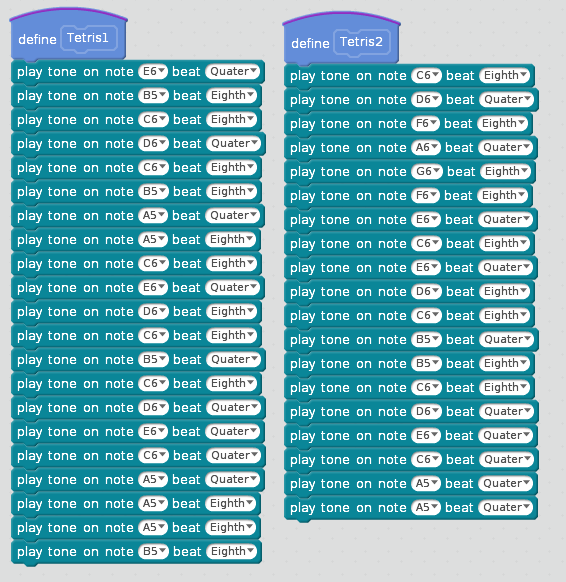
Por último, se intercalan en el programa los bloques con el encendido alternado de los motores de modo que el robot gira en una sola dirección simulando un paso de baile. Este movimiento cambia de dirección al comenzar la segunda parte de la canción. El procedimiento se repite dos veces y se activa con el control remoto:

Finalmente, el resultado en acción es el siguiente:
¿Cuál sería tu voto para el show de mi robot?
Este es el quinto post sobre nuestras experiencias con mBot. Si te intersa conocer como llegamos aquí podés vistar nuestros post anteriores: “Primeras experiencias en robótica educativa”, “Con ojos de robot” , “¡Alto ahi”: Programando con el control remoto” y “Música robótica” en este mismo blog.
|
martes, abril 05, 2016
Los jóvenes, la escuela y las redes ¿Cómo se transformaron las escuelas secundarias?

La investigación se proponía indagar, desde la perspectiva de los estudiantes, cómo se ha visto modificada la relación entre pares y la relación pedagógica en las escuelas secundarias a partir de la incorporación de las computadoras provenientes del Programa Conectar Igualdad. Nos interesó particularmente evidenciar si existían diferencias (dentro y fuera de la escuela) en las formas de apropiación de los dispositivos por parte de los jóvenes y comprender cómo diseños pedagógicos y prácticas institucionales recuperan e influyen en las nuevas formas de participación y de construcción de ciudadanía digital.
Este proyecto, involucró en su trabajo de campo estudios de casos en seis provincias argentinas. Los inivito a conocer el material de divulgación que generamos para comunicar los principales hallazgos:
Para descargar el informe completo:
Para ver más información sobre el proceso de trabajo, les sugiero visitar el sitio de la investigación:
sábado, marzo 12, 2016
Música robótica
¿Podemos hacer que MBot ejecute una pieza musical? Claro, solo que hay que saber un poquito de música para poder programalo para eso. La placa Arudino viene equipada con un buzzer así que podremos programarla para que emita el sonido que querramos en el tiempo correspondiente. En ese sentido el desafío es más que intersante ya que requerirá tomar muchas decisiones en relación a ciclos que se repiten y a la notación musical.
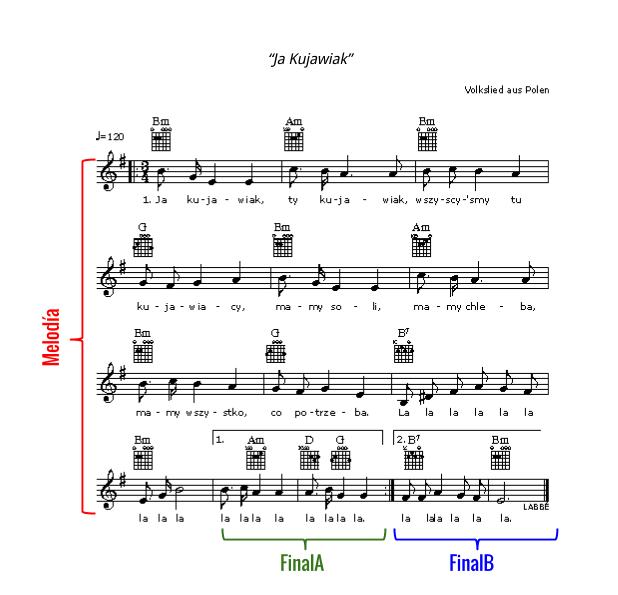
Para hacerlo más complicado vamos a empezar con la partitura de una melodía que presenta dos finales diferentes… como esta, una canción folklorica polaca llamada “Ja Kujawiak”. ¿Cómo nos organizamos?
Lo primero que nos conviene hacer es reconocer los ciclos. Aquí veremos que tenemos una melodía principal y dos finales diferentes que se ejecutan tras finalizar la melodía principal. Entonces, nos convendrá dividir la canción en tres bloques: “Melodía”, “Final A” y “Final B”. Luego programaremos a Mbot para que ejecute estas tres partes siguiendo el orden indicado por la partitura.
Para programar los sonidos, tenemos que recurrir a la escala americana, ya que los bloques de MakeBlock para Scratch ofrecen esa notación. Recordemos entonces los equivalentes de cada nota musical entre el sistema latino y el americano:
Do = C
Re = D
Mi = E
Fa = F
Sol = G
La = A
Si = B
Finalmente, como tendremos que programar la duración de cada nota, es necesario establecer una equivalencia para cada duración. En este caso hemos elegido asignar la duración “half” (medio tiempo) a las figuras de un tiempo (negras) y calcular a partir de allí las notas de mayor y menor duración. De esta forma, le damos un poco más de “velocidad” a la canción.
El resultado puede verse en los tres bloques (Blocks) preparados para cada fragmento musical:

¿Algo no suena bien?
Pero tenemos un problema. Los bloques disponibles en Scratch no admiten semitonos, los cuales, si miramos bien la partitura, son necesarios. Para ello, entonces, necesitaremos modificar los valores en la versión del programa (en modo texto) en Arduino IDE y reemplazar, con mucho cuidado, las frecuencias que se correponden a semitonos. Consultar una tabla de frecuencias como la que incluímos a continuación ayudará a saber cual es el tono exacto para los semitonos:

En nuestro caso debíamos reemplazar varios Fa y un Re sostenido. Esto requería cambiar las frecuencias 349 y 294 por 370 y 311 respectivamente… veamos el caso del Fa que debe transformarse en Fa sostenido en el fragmento “Final B”:
void FinalB()
{
buzzer.tone(349, 250);
buzzer.tone(349, 250);
buzzer.tone(440, 500);
buzzer.tone(392, 250);
buzzer.tone(349, 250);
buzzer.tone(330, 1000);
}
|
Ahora que ya hemos resuelto los problemas más serios, podemos incluir en el programa las líneas que nos permitirán establecer el orden en que debe ejecutarse la partitura… y el comando para iniciarlo desde el botón del control remoto. Lo cual, utilizando los bloques predefinidos al inicio, se verá así:

Finalmente, Mbot puede ejecutar la música… ¡y ya está preparado para resolver otros problemas mucho más complicados!
Este es el cuarto post sobre nuestras experiencias con mBot. Si te intersa conocer como llegamos aquí podés vistar nuestros post anteriores: “Primeras experiencias en robótica educativa”, “Con ojos de robot” y “¡Alto ahi”: Programando con el control remoto” en este mismo blog.
|
martes, marzo 08, 2016
Redes, producción, movimientos sociales y otras ideas que Manuel Castells presentó en una charla
El 8 de marzo de 2016 en el Centro Interdisciplinario de Estudios en Ciencia, Tecnología e Innovación (CIECTI), el Dr. Manuel Castells presentó su conferencia “Modelos de desarrollo en la era de la información: globalización, tecnología y empresa en red”. El evento resultó especialmente interesante porque siempre es inspirador escuchar de fuente primaria aquellas ideas que hemos leído, citado, analizado… quizá hasta cuestionado, en la voz del mismo autor.
No hubo slides, la exposición fue informal, las ideas surgían claras, aunque no predominó la sistematización. Fue una presentación casi vivencial, cordial, blanda… Por esta razón, antes de avanzar es importante aclarar que no prentende ser este post un desarrollo prolijo de las ideas de Castells (para ello muchísimo mejor revisar su producción académica) pero sí contarles el devenir de la charla y los tópicos que, a mi criterio, más brillaron en el auditorio.
¿Qué es el desarrollo?
Castells comienza su conferencia presentando con rigurosidad cuál es el concepto de desarrollo que utiliza. En efecto, señala que la consideración teórica es importante porque se trata de un concepto ambiguo y explica:
En el contexto de la era de la información, el desarrollo es el proceso social mediante el cual las personas (no los países, aclara) individual y colectivamente incrementan sus capacidades para mejorar sus vidas en concordancia con sus valores e intereses.
Ahora bien, para describir las características generales de la sociedad en que contextualiza esta idea de desarrollo, describe algunas dimensiones centrales de su muy conocida conceptualización de la “era de la información”.
Comienza afirmando que la revolución tecnológica informacional, paradigma de los años 70, se expande a todo el mundo en las décadas subsiguientes… sin embargo, rápido se apura a aclarar que, en realidad, sociedad e información siempre han existido pero ahora se ha producido una revolución que podría ser comparable a la revolución industrial. Se trata de una revolución porque los cambios son tan importantes que dan lugar a una nueva estructura social. Como es sabido, a esta nueva estructura social, Castells prefiere llamarla “sociedad en red”.
Como un ejemplo de estas nuevas estructuras que impactan en todos los sectores de la sociedad, Castells explica que las empresas pueden aliarse de diferentes formas según las circunstancias. Mientras en algún lugar pueden complementarse, en otros sitios pueden ser competidoras. Así, una empresa en red no sería una red de empresas sino alianzas que cambian. Esta lógica puede observarse en muchos otros espacios: sociales, científicos, políticos, etc. Concluye Castells que, en la actualidad, el universo tecnosocial está basado en en redes.
Jerarquía vs. red
Las redes no son nuevas, existen desde hace muchísimo tiempo. Y desde siempre puede pensarse que la gran ventaja de una red reside en su la flexibilidad para adaptarse y reconfirgurarse a las condiciones cambiantes del entorno. Sin embargo, al mismo tiempo, en sus versiones más antiguas, las redes ponían en evidencia mucha dificultad para manejar la complejidad por el gran volumen de elementos incluídos en la red. Pero esta desventanja de la organización en red puede subsarnarse a través del uso de la tecnología. En efecto, la tecnología da a las redes la posiblidad de fortalecerse y ponerlas en ventaja frente a organizaciones verticales.
La tecnología transforma las redes en formas de organización especialmente ventajosas que impone nuevas estructuras. Castells sostiene que, en este sentido, hay que salir de la vieja lógica de las patentes porque eso boloquea la sinergia de interacción y no promueve la innovación. No es una cuestión de ideología, se apura a enfatizar. Se trata de despegarse de la ortodoxia, de las formas tradicionales de producir para crear nuevos modelos de negocios.
Las tecnologías de la información, redes y producción de riqueza
El bienestar humano, si bien es un concepto mucho más amplio, en gran parte está condicionado por el crecimietno económico y la producción material de riqueza. En este sentido, pueden destacarse tres formas en que las tecnologías impactan y se relacionan con las formas de producción:
- El impacto positivo de las tecnologías de la información en la productividad: el desrrollo de la capacidad productiva permite la generación de riqueza, la cual puede, a nivel global incrementar la productividad y competitividad de empresas y países. En los años 80 se discutía si las tecnologías de la información impactaban en la productividad. Pero a partir de la década del 90 quedó claro que el aumento en la productividad a partir de la incorporación de tecnologías de la información en los circuitos productivos era empíricamente comprobable. Sucede que estos cambios no pueden ser apreciados en el corto plazo ya que requieren tiempo para difundirse en la socidad hasta que finalmente lleguen a impactar en la totalidad de la estructura productiva. Algo similar sucedió, en su momento conla revolución industrial. Quizá la gran diferencia es que para observar los impactos de esta última revolución solo pasaron 20 años. Los tiempos se han acelerado.
- La organización en red mejora la productividad: un estudio de los años 90 mostraba, en los EEUU, comparaciones entre empresas organizadas en lógicas verticales con otras organizadas en red. La introducción de estas tecnologías en las primeras hacía que estas disminuyeran su productividad. En estas formas de organización, la informatización tiende a hacer aumentar la burocracia y su impacto es negativo. En empresas con estructuras en red, por el contrario, la productividad aumentaba. Esta afirmación también vale para otro tipo de organizaciones, como por ejemplo, un ministerio.
- El desarrollo de recursos humanos: los recursos humanos son necesarios para que las redes funcionen. Una estructura red requiere que los nodos tengan capacidad de autonomía, y ello exige que las personas que forman parte de esa red tengan capacidad de actuar de ese modo. En síntesis: la capacidad humana es clave no solo respecto al uso de la tecnología sino a la forma de trabajar con autonomía, en red.
Las tensiones del desarrollo: ¿somos realmente felices?
Si bien el desarrollo material vinculado a la producción de riqueza, parece, en principio ser bueno para la socidad, se observa que en este proceso aparece tensiones o efectos cuyo impacto no sería deseado… o positivo. Entre ellas:
- La desigualdad: una gran productividad también genera condiciones de desigualdad, dado quienes tienen más capacidad para generar riqueza van concentrando y acumulando cada vez más.
- Deterioro de la calidad de vida: las transformaciones escológicas pueden afectar tanto el mediambiente hasta impactar negativamente. Algo similar puede suceder con al violencia iinterpersonal y el miedo, algo frecuente en las grandes metrópolis.
Todo esto lleva a pensar que el desarrollo no estan importante si no lleva a la felicidad. Porque no se trata solamente del binestar material sino la capacidad de gestionar la vida de otra manera. Cabe entonces repensar el desarrollo como capacidad de reconocer las aspiraciones diversas de los seres humanos. El desarrollo puede entenderse así como el empoderamiento de las personas para decidir lo que ellas consideran como bienestar. Y en esta órbita entra también el desarrollo politico o la capacidad de las sociedades para ir definiendo las condiciones de su propio desarrollo.
Expresión reciente de los modelos de desarrollo en América Latina
Finalmente Castells analizó los modelos más recientes de desarrollo en nuestra región. Contrasta así el modelo “neoliberal” (aunque muestra sus reparos por el prefijo “neo”) y un modelo “neodesarrollista”. Señala que el primero fracasó porque no fue capaz de generar la integración económica y por la resistencia u oposición social bajo diferentes formas. El segundo, en el que aparecen políticas distributivas con mayor intervencionismo estatal, también encuentra su punto débil: cierta insosteniblidad en términos económicos, ya que, sin un desarrollo competitivo los recursos que van quedando para la distribución van siendo menores y finalmente no alcanzan. Adicionalmente, los líderes carismáticos que llegan al poder, suelen tener la tendencia a promover un sistema corrupto. Frente a estas tensiones, observa Castells que aparecen movimientos sociales (todos los movimientos sociales son “sociales” y no solo aquellos con los cuales simpatizamos) que se expresan para señalar el agotamiento de modelos que no logran integrar el desarrollo humano o para señalar que no bastan para mover la economía. Entonces, la sociedad reacciona y plantea así nuevas condiciones a través de su participación.
 |
| Manuel Castells en el CIECTI, Buenos Aires, Argentina |
Más información sobre la conferencia
miércoles, febrero 24, 2016
¡Alto ahi! Programando el control remoto
Algo importante a tener en cuenta es que cada vez que cargamos un programa nuevo a nuestro robot estamos borrando el anterior. En otras palabras, un programa pisa a otro programa. Esto, puede parecer medio engorroso pero al mismo tiempo permite preparar al robot para realizar tareas muy específicas y que no haya lugar a confusión. Pero también podríamos pensar en varios programas a la vez que se activaran a través de un menú… es una buena idea, pero antes de pensarla es importante conocer las posiblidades del control remoto.
Hasta ahora habíamos pensado pequeños programas autónomos, esto es, programas en los cuales el robot sigue una serie de instrucciones de acuerdo a lo que indican los sensores. Pero a esta cuestión, podríamos ahora agregar acciones al robot que dependieran de una instrucción en tiempo real enviada a distancia.
El misterio del control remoto
Un control remoto es un dispositivo que se comunica a través de señales infrarojas. La radiación infrarroja es un tipo de radiación electromagnética y térmica invisible al ojo humano… con una simple camara de celular podemos verificar si el control remoto funciona correctamente.
Una vez que verificamos que el control funciona (lleva una batería en su interior, que debe estar cargada) vamos a programar a mBot para que siga la instrucciones que le daremos, infrarrojos mediante.
La programación del control
Programar el control remoto es bastante simple, ya que solo tendremos que usar el condicional que indique que si apretamos un botón del control, el robot debe moverse en una dirección determinada. La primera dificultad que detectaremos al resolver esta cuestión es que, al girar, el robot necesita tiempo para posicionarse y avanzar. Eso lo tendremos que tener en cuenta en la programación e introducir una "espera" que permita adaptar nuestras órdenes a los tiempos físicos en los que el robot se mueve.
Por otra parte es importante que tengamos en cuenta, también, que no se trata solamente de avanzar y avanzar… ¿que pasa si nos sorprende una pared? No queremos que el robot se estrelle así que tomaremos una medida de seguridad: vamos a configurar el sensor ultrasónico frontal para que, al detectar un obstáculo a unos 25 cm, se detenga automáticamente.
Por otra parte es importante que tengamos en cuenta, también, que no se trata solamente de avanzar y avanzar… ¿que pasa si nos sorprende una pared? No queremos que el robot se estrelle así que tomaremos una medida de seguridad: vamos a configurar el sensor ultrasónico frontal para que, al detectar un obstáculo a unos 25 cm, se detenga automáticamente.
El programa en Makeblock (versión de Scratch para mBot) quedaría, entonces, así:

¡Alto ahi!
Y como verán, al final del programa, incluimos unas líneas para colocar un freno “manual”, de manera tal que, si algo falla, podamos activarlo. Esto supone que los motores se detendrán si presionamos la tecla “A” en el control. Como broche final, una agregamos dos notas a modo de bocina, cosa que el robot avise que, efectivamente, recibió la señal de ¡Alto ahí!
Este es el tercer post sobre experiencias con mBot.
Si te intersa conocer como llegamos aquí podés vistar nuestros posts anteriores: “Primeras experiencias en robótica educativa” y “Con ojos de robot” en este mismo blog. |
Suscribirse a:
Entradas (Atom)